|
|
|||||
|
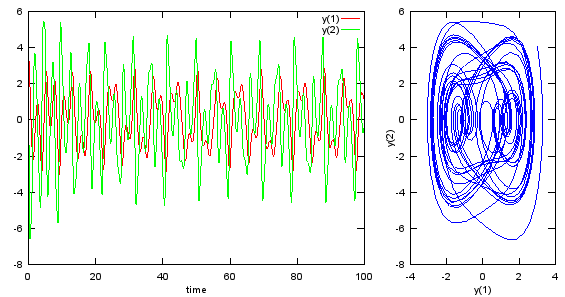
The Duffing oscillator is a well-known and widely studied system in nonlinear dynamics, often used to illustrate complex behaviors such as bifurcations and chaos. It serves as a quintessential example of how simple nonlinear systems can produce rich and sometimes unpredictable dynamics. Typically, it models a damped oscillator with a nonlinear restoring force and an external periodic driving force. Although the specific notation and parameter names can vary slightly across different texts and studies, the underlying structure of the equation remains fundamentally the same. The system's sensitivity to initial conditions and parameter values makes it a powerful demonstration tool for exploring the transition from regular motion to chaotic regimes in physics and engineering. Build Up IntuitionBefore diving into theory, I would like you to have a chance to play with this simple simulation and build your own intuition about the dynamics of the Duffing oscillator. Building up intuition is important because it grounds abstract mathematical concepts in visual and experiential understanding. Especially in nonlinear systems like this, where small parameter changes can lead to dramatically different outcomes, intuition helps you recognize patterns, anticipate behaviors, and grasp the qualitative nature of stability, bifurcation, and chaos—long before equations reveal them formally. By interacting with the system directly, you train your mind to connect cause and effect in dynamic environments, which is essential not just for learning, but for creativity and problem-solving in complex systems. Time Series (t vs x, t vs ẋ)
State Space (x vs ẋ)
X: -, Y: -
Following is usage of this program. Starting the Visualization
Parameter Controls
Visualization Options
Preset Configurations
Zoom ControlsBoth Time Series and State Space plots have independent zoom options:
Additional Features
There is another way of visuallizing the chaotic behavior of a system. Poincare map is the one. A Poincaré map offers a powerful way to visualize the complex behavior of dynamical systems, especially in the context of chaos. Unlike traditional time series plots that show how a variable evolves over time, or state space trajectories that illustrate continuous paths through a system's phase space, a Poincaré map samples the system at discrete intervals—typically once per forcing period in a driven oscillator. This results in a scatterplot that condenses high-dimensional behavior into a two-dimensional slice, making it easier to identify periodicity, bifurcations, or chaotic regimes. While time series and state space plots help us see the continuous evolution of motion, the Poincaré map captures the underlying structure of that motion, offering a more distilled view of long-term dynamics and stability. Mouse: (-, -)
FPS: -
Sim Time: 0s
Followings are the description on how you play with this program ParametersThe Duffing oscillator is defined by the equation: ẍ + δẋ + αx + βx³ = γcos(ωt) Adjustable parameters:
Simulation Controls
Interactive Features
How it works ?The Duffing oscillator is a well-known example of a system used to demonstrate chaotic behavior and dynamics. It is represented mathematically by a second-order differential equation that incorporates terms for displacement, velocity, and nonlinear restoring forces. The general form of the equation is:
The meaning of each terms and coefficients are as follows : x = displacement dx/dt = velocity d2x/dt2 = acceleration δ = damping coefficient ω0 = natural frequency of oscillation β = nonlinearity coefficient γ = forcing amplitude ω = forcing frequency φ = phase shift of forcing function Here, each term and coefficient has a specific meaning. The variable x represents displacement, dx/dt represents velocity, and d2x/dt2 represents acceleration. The parameter δ is the damping coefficient, which quantifies the system's resistance to motion. The terms β and ω0 describe the nonlinear and natural frequency of oscillation, respectively. The forcing term γ cos(ωt + φ) accounts for an external periodic force, where γ is the forcing amplitude, ω is the forcing frequency, and φ is the phase shift of the forcing function. The characteristics of the Duffing oscillator arise from the nonlinearity introduced by the x3 term. This nonlinearity enables the system to exhibit chaotic behavior under certain conditions. Depending on the parameter ranges, the oscillator may display bounded, periodic oscillations or chaotic dynamics. Varying the forcing frequency ω relative to the natural frequency ω0 has a significant impact on the behavior of the system. As parameters are adjusted, the oscillations may switch between regular periodic motion and chaotic trajectories. An important feature of the Duffing oscillator is its sensitivity to initial conditions. Even slight changes in the starting values can result in vastly different trajectories over time. The phase shift φ of the external forcing function plays a crucial role in determining when chaotic regimes emerge. To explore the behavior of the Duffing oscillator, tools like phase portraits and Poincaré sections can be used. These visualizations reveal the underlying attractors of the system and help illustrate its transition between order and chaos. By numerically solving the equation and experimenting with different parameters and initial conditions, one can observe how the system evolves and how its dynamics change in response to external influences. The characteristics of this equation can be summarized as follows :
You can plot out the solution of this equation using a simple script below. Play with parameters and initial conditions and see how the plot changes.
|
|||||